It’s not easy countering drones.
As fast as the drone industry is growing with hobbyist and commercial drone counts in the low millions by 2021, some anticipate that the counter-drone industry will be even larger with a combined annual growth rate of almost 26% between 2017 and 2021. Increasing the challenge, because of the multitude of factors involved in drone deployments and the many places of interest where drones can be deployed, whether individually or en masse, there are a surprisingly large number of scenarios to consider when developing and deploying counter-drone technologies and that in turn makes development and deployment of counter-drone technology particularly difficult.
There are obvious concerns amongst commercial, private, and government entities around risk stemming from drone use (to include property loss, privacy, injury, and potentially death) — such as drones over flying nuclear plants in France, drones snooping in the Olympics in Rio, drones with cameras outside 26th floor high rise apartments in Seattle, and many others. The challenge is that there are so many factors and so many interdependencies between those factors, that it can be hard to establish a shared conceptual framework around counter-drone approaches to even have a discussion about the concerns.
Already, many different approaches to counter-drone strategies
The broad and varied approaches of counter-drone technologies already on the market speak to the diversity of potential drone deployments and the areas in which they will operate – and which ostensibly there is a desire to be countered. For example, DroneShield’s DroneGun uses a rifle-like radio frequency jammer. Skywall uses a shoulder-fired drone-capturing net. The US Air Force is trying out net-filled shotgun shells by SkyNet and Malou Tech offers drone-nets-drone technology. And the US Navy and Marine Corps bring it on home with laser, aka directed energy, anti-drone approaches. The approaches are wide-ranging and I think we’ll continue to see even more evolution and many more companies in the space.
One approach for considering counter-drone systems
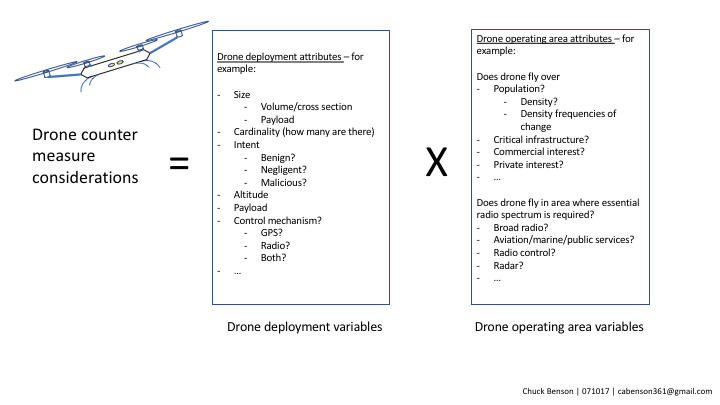
An approach discussed here splits out variables/attributes in drone deployments and operation from the variables/attributes of the operating area and what it contains into two separate sets of factors. This provides a broad base for conceptualizing counter-drone considerations. These two sets of factors are:
1. drone deployment attributes and
2. drone operating area attributes
In turn, each set of factors also has its own multiplicity of factors and interdependencies between them.
many factors to consider in counter-drone systems development
Drone deployment attributes
When considering how to counter drones, there are many factors that contribute to any particular drone deployment. A few of them are:
- Mass – How much does the drone weigh?
- Altitude – Is there a characteristic altitude of the deployment?
- < 50 feet?
- 50 – 200 feet?
- above 200 feet?
- varies?
- Potential Energy (PE)
- derives from mass & altitude
- Velocity
- Is there a characteristic speed of the drone(s)
- 5 mph?
- 5 – 20 mph?
- > 20 mph?
- Varies?
- Is there a characteristic speed of the drone(s)
- Kinetic Energy (KE)
- derives from velocity and mass of drone
- rotor rotation also contributes to KE
- Volume – What is the size of the drone?
- cross-section?
- diameter across opposing rotor tips?
- Cardinality
- Is it just one drone?
- 2 – 25 drones?
- 25 or more drones?
- Behavior >1 drone
- is the behavior coordinated?
- are they operating independently?
- sporadic?
- Intent – Is the operator intent:
- malicious?
- benign?
- negligent?
- operator-impaired?
- What is the payload of the drone?
- nothing?
- camera?
- explosive
- radiological?/chemical?
- combination?
Effects of factor interdependencies (aka Potential Energy can become Kinetic Energy)
As discussed, these factors can have substantial interdependencies between them as well. One of the interdependencies that is the most basic and seems to be often forgotten in conversation is that any drone with any altitude has Potential Energy. Regardless of motors, batteries, wind, payload, etc — just the fact that a mass (drone) has been raised to an altitude, it now has Potential Energy. The larger the mass and the higher the altitude, the more Potential Energy is converted to downward directed Kinetic Energy if a drone stops flying – for whatever reason. This may be important to anyone in the path of the dead drone’s earth-seeking trajectory.
Drone operating area attributes
The other part of the equation is what is the drone’s operating area? What are those things on the ground (or in the air) that have value? This could be the value that one puts on their individual privacy, to the value a corporation puts on a production facility, the value a city puts on a power substation, or the value of 50 people watching a little league game or 50,000 people watching an NFL game. Some operating area attributes/variables include:

- Does/do the drone(s) fly over a population?
- Population size – 10’s, 100’s, 1000’s, more?
- Density
- rural
- city
- high density congregation (eg professional sports game, parade, concert, ..)
- does the population density change, eg high when ball games & low when not
- Does/do drone(s) fly over/near critical infrastructure?
- power
- water – dams, reservoirs, …
- gas
- sewer
- nuclear
- Does/do drone(s) fly over/near schools, churches, hospitals …
- Does/do drone(s) fly in area of critical radio spectrum?
- broadcast
- police, fire
- aviation, marine
- military
Counter-drone Combinatorics
So let’s take a combination and create a constraint domain to illustrate the point. Where there is a broad range or spectrum of possibilities for a particular attribute, I break them down into three arbitrarily chosen sub-ranges. This will allow us to make the numbers smaller and a little more manageable and yet still see how the number of possibilities to consider can become quite large. You can, of course, break them down into whatever sub-ranges you would like and into as many sub-ranges as you would like.

the number of scenarios can scale quickly
Some counter-drone systems will naturally address multiple scenarios. However, to be effective and competitive in a rapidly growing market, the counter-drone systems developer has many flight profiles and many operating area profiles to consider.
Another factor in counter-drone technology development is the legal aspect. Examples include laws regarding national aviation system navigational system protection, individual state law, and civil lawsuits. This will likely be a substantially evolving landscape as drone technologies evolve and damaging events occur with real loss.
Dynamic landscape
When considering the factors involved in developing or evaluating counter-drone technologies, one approach that can be helpful is to think about both the characteristics of the drone (or drones) potential flight as well as the area in which the flight will occur and what’s valuable in that space.
With rapidly evolving and distribution of drone technologies, rapidly evolving counter-drone technological approaches, increased public awareness, and changes in local, state, and federal laws, I think investment, development, and deployment of counter-drone technology will continue to be a very dynamic realm.